A la suite de la coupe de nîmes, nous avons voulu rententer l'aventure avec la coupe de france robotique. Il s'agit d'un défi ludique, scientifique et technique où se rencontrent des robots autonomes réalisés par des équipes de jeunes passionné(e)s de la robotique. Les robots s'opposent dans une "aréne", chaque robot doit être complètement autonome (il doit disposer de ses propres sources d'énergie, actionneurs, capteurs et intelligence), et toutes les commandes à distance et interventions extérieures sont interdites pendant les matchs. Chaque année, le règlement de jeu est mis en ligne au cours du mois de septembre. La rencontre a lieu la semaine de l'Ascension de l'année suivante. Si vous voulez en découvrir plus sur la LLA, allez ici.
Règlement
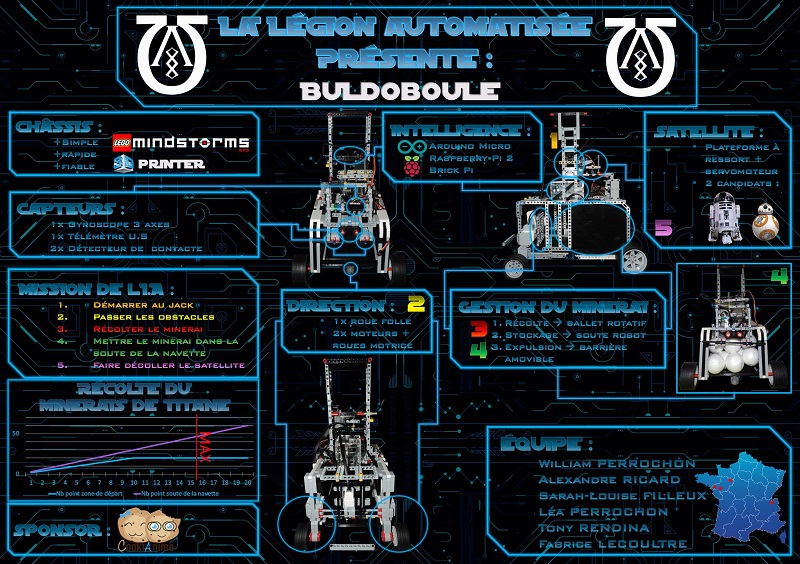
Mission
> Démarer au Jack
Nous pouvons mettre en route le robot pour qu'il fasse toutes ses vérifications (alimentation, camps, etc). Le robot ne doit pas commencer à bouger avant le top départ. C'est pour cela que nous avons installé un jack, autorisant le robot, dès que le jack est enlevé, à pouvoir s'élancer sur l'arène.
> Passer les obstacles
Nous avons choisi une roue folle et des moteurs à courant continu pour le déplacement du robot afin de permettre une mobilité facile pour éviter les obstacles du plateau. Pour détecter les obstacles le robot est muni de plusieurs capteurs (Télémètre U.S, Capteurs de contacts, ...).
> Récolter le minerai
Pour récolter le minerai, nous nous sommes inspirés des robots aspirateurs. Un système balai rotatif attire les boules à l'intérieur du robot, puis les stocke dans son ventre.
> Mettre le minerai dans la soute de la navette
Nous nous déplacons jusqu'a la navette, pour ensuite inverser le balai rotatif afin de déverser le contenu du robot dans la navette.
> Faire décoller le satellite
Nous avons fait décoler le satellite grâce à un servomoteur et un ressort. Le servomoteur sert à relacher la pression du ressort lorsque 90 minutes se sont écoulées.
> Communication
Pour séparer les tâches du robot, nous avons utilisé plusieurs cartes. Nous avons donc fait une passerelle d'échange d'information entre la carte mère (commande) et les cartes filles (acquisition de données).
Technologies
Raspberry, Robot LEGO, Python, Arduino, C++, BrickPI, Imprimante 3D, CNC, Thread
Programmes et/ou compte rendu
Bilan
| Les + : Endroit convivial / Projet enrichissant
| Les - : Travail fait au dernier moment